
 French
French Deutsch
DeutschSistemi direttivi subacquei

I sistemi direttivi subacquei sono parte essenziale di un sonar [1] e sono indispensabili nella scoperta dei bersagli[1], hanno il compito di ricevere le onde acustiche emesse dai semoventi marini per trasformarle in deboli tensioni elettriche emergenti[2] dalle tensioni dovute al rumore presente in mare; l'abbattimento delle tensioni dovute al rumore del mare rispetto alle tensioni dovute ai bersagli può essere, indicativamente ad esempio, nel rapporto lineare:

Il rapporto rappresenta il guadagno del sistema direttivo[N 1], detto anche guadagno di cortina.
I sistemi direttivi nei sottomarini
[modifica | modifica wikitesto]Generalmente un sistema direttivo subacqueo è costituito da un insieme di sensori (Idrofoni)[3] disposti opportunamente nello scafo di un sottomarino come componente primaria del sonar installato sul battello.
I sistemi direttivi subacquei sono indispensabili nella localizzazione dei bersagli individuati dal sonar.
L'insieme dei sensori fissati sullo scafo resistente sono indicati come base idrofonica.[N 2]

Se i sensori sono disposti a babordo, a tribordo ed a prua del sottomarino, questa geometria convessa è denominata base conforme.
I sensori per la base idrofonica sono più propriamente indicati come stecche idrofoniche[N 3][4],

Le dimensioni della base conforme evidenziano la notevole differenza tra la lunghezza, dipendente dal numero delle stecche idrofoniche e l'altezza della stesse, ciò porta ad un sistema direttivo subacqueo più efficiente nel piano orizzontale che nel piano verticale.
Il sistema direttivo subacqueo rappresenta il mezzo con il quale si captano le onde acustiche emesse dai bersagli[5] riducendo, nel contempo, il rumore presente nell'ambiente; tutto ciò allo scopo di localizzare i bersagli stessi.
Compito preminente della base è il ricevere la maggior quantità possibile di energia sonora, proveniente dai bersagli, energia indicata come segnale, riducendo al minimo la ricezione del disturbo [N 4][6] presente nell'ambiente subacqueo.
La riduzione del rumore deve essere fatta prevalentemente a livello acustico perché, una volta tradotte le pressioni acustiche in corrispondenti tensioni elettriche, risulta molto difficile eliminare i disturbi che inquinano il segnale.
La caratteristica di direttività
[modifica | modifica wikitesto]La caratteristica di direttività [2][7]di un sistema acustico subacqueo indica come varia la sensibilità di ricezione con il variare della direzione di provenienza dell'onda sonora.
Se la sensibilità è la massima possibile in una direzione, ad esempio, e diminuisce molto rapidamente con il variare di si dice che la base ricevente ha una buona direttività, cioè presenta una direzione preferenziale d'ascolto.

La direttività di un gruppo di sensori (Idrofoni) ottenuta sommando i contributi di tensione generati dai singoli idrofoni opportunamente ritardati, è governata da leggi matematiche che consentono di calcolare l'andamento della loro somma in funzione di diverse variabili[8].
La direttività nel piano verticale
[modifica | modifica wikitesto]
Consideriamo un sottomarino e due bersagli, il primo dotato di sonar e base idrofonica in immersione a di profondità, con un fondale distante da esso altri ; i bersagli siano posti, uno in superficie, l'altro sul fondo, entrambi alla distanza di dal sottomarino, gli angoli formati dalle congiungenti bersagli-sottomarino, con l'asse della base idrofonica, risultano di circa , per distanze maggiori tra bersaglio e sottomarino gli angoli diventano ancora più piccoli.



La base idrofonica del sottomarino per ricevere il segnale nel piano verticale utilizza soltanto un angolo di circa , ( verso l'alto e verso il basso) la restante parte del piano, oltre i non serve ai fini della localizzazione.

Di qui l'esigenza di rendere la base sensibile soltanto in un piccolo settore verticale, in modo da evitare che essa capti il disturbo ambiente in quella parte di piano che non interessa la ricezione dei segnali.
Il problema è parzialmente[N 5] risolvibile utilizzando, come elementi sensibili della base, dei gruppi di idrofoni elementari sistemati in strutture rettilinee verticali dette stecche idrofoniche, con esse si realizzano buoni sistemi direttivi subacquei.
La direttività nel piano orizzontale
[modifica | modifica wikitesto]
Un sottomarino che si appresti alla scoperta di un bersaglio con il sonar, grazie al sistema direttivo subacqueo, è in grado di individuarlo anche se il rumore presente in mare tende a coprire i segnali acustici emessi dal semovente.
Il sistema direttivo consente la formazione di una sensibilità di ricezione indirizzata nei soli confronti dei segnali del bersaglio in una zona di mare privilegiata nella quale il rumore esterno ad essa viene ridotto d'ampiezza secondo l'andamento della curva caratteristica detta di direttività.
L'andamento delle curve di direttività può essere computato e tracciato o in coordinate cartesiane o coordinate polari.
Le prime sono impiegate nelle fasi di studio dei sistemi direttivi, le seconde sono adatte alle osservazioni di carattere operativo perché rispettano le geometrie sul campo.
- Curve di direttività
-
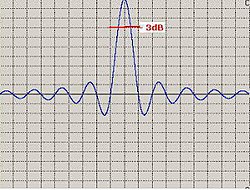 Curva di direttività tracciata in coordinate cartesiane
Curva di direttività tracciata in coordinate cartesiane -
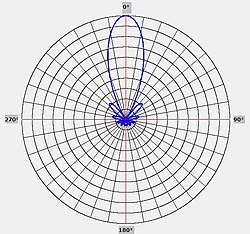 Curva di direttività tracciata in coordinate polari
Curva di direttività tracciata in coordinate polari


Strutture di un sistema direttivo subacqueo
[modifica | modifica wikitesto]La composizione di un sistema acustico ricevente disposto secondo il profilo dello scafo di un sottomarino è indicato come base conforme.
La disposizione della base conforme nel contesto dell'unità subacquea risulta montata sotto il falso scafo[N 6][9] e fissata allo scafo resistente[N 7].
- La base conforme
-
![Base conforme vista in pianta[N 8]](//upload.wikimedia.org/wikipedia/commons/thumb/f/f4/Conformesauro.jpg/160px-Conformesauro.jpg) Base conforme vista in pianta[N 8]
Base conforme vista in pianta[N 8] -
 Collocazione base conforme sotto il falso scafo del sottomarino
Collocazione base conforme sotto il falso scafo del sottomarino -
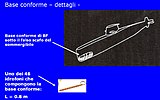
 Fotografia di parte della base conforme normalmente coperta dal falso scafo
Fotografia di parte della base conforme normalmente coperta dal falso scafo
![Base conforme vista in pianta[N 8]](/it/File:Conformesauro.jpg)


La base conforme riceve ottimamente le onde acustiche dato che la porzione del falso scafo, che copre le stecche idrofoniche, è trasparente al suono; questa particolare copertura è indicata come finestra acustica.
Lo scafo resistente del sottomarino dove sono fissate le stecche idrofoniche è ricoperto di materiale assorbente al suono che evita i rimbalzi delle onde acustiche da parte dello scafo, scherma inoltre le stecche per evitare che queste possano ricevere suono dalla parte posteriore del loro schieramento.
In alcuni casi la schermatura risulta insufficiente è la base idrofonica riceve segnali acustici, molto attenuati, anche dal fronte opposto al suo schieramento.
La ricezione di onde acustiche dal retro della base idrofonica, anche se molto attenuate, può portare a rilevamenti ambigui da parte del sonar.
Direttività e stecche idrofoniche
[modifica | modifica wikitesto]Quando un sistema direttivo viene colpito dal segnale emesso da un bersaglio la capacità di discriminarlo dal rumore è dipendente dal numero di stecche idrofoniche che lo compongono. Se il sistema direttivo fosse dotato di sole due stecche la direttività sarebbe praticamente nulla, questo riceverebbe in egual modo il rumore del mare su quasi 180°. Se si raddoppiassero il numero delle stecche si avrebbe una irrilevante riduzione del rumore.
Per iniziare ad avere un vantaggio del sistema direttivo sul rumore il numero delle stecche deve essere di 16 o più unità[N 9].
La direttività non cancella completamente il rumore del mare dato che questo, nella direzione del bersaglio, è sempre presente anche se a basso livello.
- Curve polari direttività base acustica
-
![Curva di direttività base acustica con solo 2 idrofoni (andamento indicativo).[N 10]](//upload.wikimedia.org/wikipedia/commons/thumb/7/74/7xdtc.jpg/250px-7xdtc.jpg) Curva di direttività base acustica con solo 2 idrofoni (andamento indicativo).[N 10]
Curva di direttività base acustica con solo 2 idrofoni (andamento indicativo).[N 10] -
![Curva di direttività base acustica con solo 4 idrofoni (andamento indicativo).[N 11]](//upload.wikimedia.org/wikipedia/commons/thumb/c/c3/8xdtc.jpg/250px-8xdtc.jpg) Curva di direttività base acustica con solo 4 idrofoni (andamento indicativo).[N 11]
Curva di direttività base acustica con solo 4 idrofoni (andamento indicativo).[N 11] -
![Curva di direttività base acustica con 8 idrofoni (andamento indicativo).[N 12]](//upload.wikimedia.org/wikipedia/commons/thumb/8/82/9xdtc.jpg/250px-9xdtc.jpg) Curva di direttività base acustica con 8 idrofoni (andamento indicativo).[N 12]
Curva di direttività base acustica con 8 idrofoni (andamento indicativo).[N 12] -
![Curva di direttività base acustica con 16 idrofoni (andamento indicativo).[N 13]](//upload.wikimedia.org/wikipedia/commons/thumb/f/f7/10xdtc.jpg/250px-10xdtc.jpg) Curva di direttività base acustica con 16 idrofoni (andamento indicativo).[N 13]
Curva di direttività base acustica con 16 idrofoni (andamento indicativo).[N 13]
![Curva di direttività base acustica con solo 2 idrofoni (andamento indicativo).[N 10]](/it/File:7xdtc.jpg)
![Curva di direttività base acustica con solo 4 idrofoni (andamento indicativo).[N 11]](/it/File:8xdtc.jpg)
![Curva di direttività base acustica con 8 idrofoni (andamento indicativo).[N 12]](/it/File:9xdtc.jpg)
![Curva di direttività base acustica con 16 idrofoni (andamento indicativo).[N 13]](/it/File:10xdtc.jpg)
I diagrammi di direttività [N 14] che definiscono la direttività della base, sono tracciati nel piano orizzontale. I grafici rappresentano di fatto una sezione in tale piano.
La direttività del sistema è di fatto è un solido che si sviluppa nello spazio subacqueo.

Collegamenti interni
[modifica | modifica wikitesto]Testo in PDF da scaricare liberamente
Note
[modifica | modifica wikitesto]- Annotazioni
- ^ Generalmente il guadagno di direttività è espresso in decibel (dB) e indica di quanto un sistema direttivo subacqueo sia in grado di abbattere il rumore del mare rispetto al livello del segnale.
- ^ La lunghezza totale della base per alcuni sottomarini supera i 20 m.
- ^ Una stecca idrofonica è costruita con un sensibile numero d'idrofoni elementari collegati elettricamente tra loro
- ^ I disturbo, indicato anche come rumore, è generato in mare dal moto ondoso ed altro.
- ^ Per ragioni fisiche soltanto una porzione di rumore può essere abbattuta
- ^ Il falso scafo è la struttura leggera che avvolge lo scafo resistente per consentire al sottomarino le caratteristiche idrodinamiche che gli sono proprie.
- ^ Lo scafo resistente è la struttura globale del sottomarino che reagisce alle elevate pressioni dell'acqua dovute alla quota.
- ^ Il diametro dei sensori non è in scala con le dimensioni del sottomarino, se lo fosse apparirebbero dei punti.
- ^ I valori sono indicativi in quanto il numero delle stecche dipende dalla dimensione della base idrofonica, dalla frequenza di lavoro e dalla distanza tra le stecche
- ^ il semicerchio rosso sottende un arco di ° entro il quale, indifferentemente, la base riceve con uguale sensibilità tanto il segnale del bersaglio quanto il rumore del mare; il sistema è privo di guadagno di direttività.
- ^ il tratto rosso sottende un arco di poco inferiore a ° entro il quale la base riceve con sensibilità di poco diverse tanto il segnale del bersaglio quanto il rumore del mare; il sistema è praticamente non direttivo.
- ^ La curva rossa sottende un arco sensibilmente inferiore a ° entro il quale la base riceve con maggior sensibilità il segnale del bersaglio che il rumore del mare; il sistema presenta un discreto guadagno di direttività.
- ^ La curva rossa sottende un arco nettamente inferiore a ° entro il quale la base riceve con elevata sensibilità il segnale del bersaglio che il rumore del mare; il sistema presenta un buon guadagno di direttività.
- ^ Interpretazione dei diagrammi polari:
- Le curve sono in coordinate polari, vengono tracciate soltanto tra ° e ° nel presupposto che la base acustica non riceva suono posteriormente perché coperta dallo scafo del sottomarino; questo è rappresentato da diametri tracciati in nero di sensibile spessore.
- Le curve di direttività sono tracciate in colore rosso
- Il bersaglio che genera rumore è una nave di superficie la cui direzione rispetto alla base acustica è indicata con tratto giallo.
- Il colore grigio che copre le curve indica la presenza di rumore in tutta la zona esplorata
- A destra sono riportate, per ulteriore comprensione della grafica, parti di una base acustica reale fotografata senza la copertura del falso scafo.






- Fonti
Bibliografia
[modifica | modifica wikitesto]- Robert J. Urick, Principles of underwater sound, 3ª ed. Mc Graw – Hill, 1968..
- J.W. Horton, Foundamentals of Sonar, Annapolis, Maryland, United States Naval Institute, 1959.
- A. De Dominics,, Principi di elettroacustica subacquea, Elettronica San Giorgio-Elsag S.p.A. Genova, 1990.
- Giuseppe Pazienza, Fondamenti della localizzazione marina, La Spezia, Studio grafico Restani, 1970, pp. 394 – 460.
- C. Del Turco, Sonar- Principi - Tecnologie Applicazioni, Tip. Moderna La Spezia, 1992.
Altri progetti
[modifica | modifica wikitesto] Wikiversità contiene risorse su Sistemi direttivi subacquei
Wikiversità contiene risorse su Sistemi direttivi subacquei