
 French
French Deutsch
Deutsch操船術

操船術(そうせんじゅつ、英: seamanship、シーマンシップ)とは、船舶、ボート、その他の水上の乗り物を操作するための技術、知識、および能力のことである[1]。
これには次のような知識と専門的なスキルが含まれる:航法と国際海事法。気象、気象学および気象予報。当直。船舶の取り扱いおよび小型ボートの取り扱い。甲板設備や錨と錨鎖の操作法。ロープワークとラインハンドリング。通信。帆走とエンジン。曳航。貨物取扱設備、危険貨物、貨物保管庫。緊急事態への対処。海上でのサバイバルと捜索救難。そして消防。
これらの分野で必要な知識の程度は、作業の性質と船の種類によって異なる。
航海術
[編集]航法は、船舶をある場所から別の場所へと安全かつ効率的に誘導する技術であり、科学でもある。水先案内人は水深と目に見える目標物を使うが、推測航法は最後に確認された場所からの航路と距離を使用する[2]。安全な航海には、船舶の現在位置を把握し続けるだけでなく、将来の位置の予測、航路計画、衝突回避が含まれる。西側諸国の航海の技術は、航空航法と同様に、単位は海里を使う。航法には現在のGPSやかつてのLORAN (LOng-RAnge Navigation) などの電子機器の使用技術も含まれる。
天測航法では、惑星、月、恒星、太陽などを六分儀によって観測し、観測結果を航海年鑑や天測計算表と照らし合わせることで、現在位置が分かる。その際、正確な時刻も必要である。航海日没後、水平線を基準とした海上航行は不可能になり、航海夜明け以降は再び可能になる[3]。
氷上航行(Ice navigation)には、それらに加えて海氷がある状態での船舶の航行および操船技術が含まれる[4]。
操船
[編集]操船術の根本は、船舶を正確かつ確実に操れることである。陸上の乗り物とは異なり、船は周囲の空気や船体が浮いている水といった流体の動きの影響を受ける。もう1つの複雑な要因として、停止および発進するときに考慮しなければならない船の質量(慣性)がある。
船舶の取り扱いとは、停泊位置や係船浮標にアクセスすること、限られた水路や港内や他の船の近くといった場所での操船、そして常に安全に航行することである。他に2種類の作業、別の船への接舷と洋上補給が含まれることもある。
船舶取扱者にとって重要な能力は、風、潮流、うねり、他の船舶の通過、および海底の形状が船舶の動きにどのように影響するかをよく理解することである。それぞれの船舶の性能により、その船舶が安全に航行できるようにする必要がある。
操船術の発展
[編集]
帆船の時代、有能な船員というのは "hand, and reef, and steer"(手、帆、舵)ができるものだ、と期待されていた。現代の商船員や水兵の訓練はもっと系統的なものになっているが、それでもこの言葉は基礎となる部分を表している。
大型船の乗組員は、通常、それぞれの専門分野別の「部(部門)」に配属される。
たとえば、甲板部は短艇の取り扱いと一般的なメンテナンスを担当し、機関部門はエンジンその他の機械を担当する。
乗組員は最も基本的な任務から始め、経験と専門知識を得るにつれて、その分野で昇進する。例えば機関部であれば、三等機関士→二等機関士→一等機関士→機関長となる。
甲板部であれば、甲板長(ボースン)をリーダーに、甲板手(ストアキーパー・クォーターマスター)、甲板員(セーラー)がいる[5]。
より小型の商用船では、専門性はほとんど、あるいは一切存在しない。甲板員は、船のすべての操作を行う。航海士は、航海、通信、および監視監督に責任がある。
船体運動
[編集]主に波による船体の揺れの6自由度を、次の成分で定義する。
回転運動
[編集]- 船首揺れ(ヨーイング; Yawing)……垂直を中心軸に、水平面で時計廻り反時計廻りに回転する。
- 横揺れ(ローリング; Rolling)……船首船尾を中心軸に、右廻り左廻りに回転する。
- 縦揺れ(ピッチング; Pitching)……左右を中心軸に、前転と後転に回転する。
平行運動
[編集]トリム
[編集]船首喫水と船尾喫水との差をトリムと呼ぶ。
- バウトリム:船首喫水が大きい時
- イーブンキール:船首喫水と船尾喫水との差がないとき
- スターントリム(またはアフトトリム):船尾喫水が大きい時
水の抵抗を最小にするにはイーブンキールが良いが、貨物船などでは空荷の時に船尾のプロペラが水面上に出てしまう場合には、わざとスターントリムにして船尾を下げることがある。コンテナ船では少しでも燃費を改善するために、積載時のコンテナ配置と運航中の燃料の消費に合わせて前後のトリムタンクの注水量を加減し、いつでもイーブンキールになるようにしている[6]。
浮力
[編集]アルキメデスの原理から、液体や気体といった流体中の物体にはそれが押し退けた流体分の重量と等しいだけの上向きの力が作用する。これが浮力の原理であり、浮力は流体(船舶の場合には水)の密度と重力加速度、物体が流体中に占める体積の積として算出できる。
船が正しく設計・造船されていれば、浮力を利用することで、波浪等で船体が傾いても復原性を発揮することが可能となる。
物体の重量が浮力より小さければ、流体上に浮いていられるが、物体の重量が浮力を上回れば物体は流体中に沈んでしまう。ヨットが大嵐にいくら揉まれても簡単に沈まないのは、船体が比較的強固に造られているため、たとえ180度上下が逆さまになっても船体の気密性が保たれている限り、内部の空間が十分な浮力を生み出すためである。
水の密度と喫水
[編集]海水では塩が溶けている分だけ淡水に比べて密度が高くなる。流体の密度が高くなると浮力も増えるため、淡水と海水では船の浮力の違いによって喫水が変化する。 アラビア半島の死海は塩分が多く溶け込んでいるため、海水浴客の体が良く浮かぶことで有名である。
波の特性
[編集]波高
[編集]波の高さは ビューフォート風力階級 0-12 で表す。 0では0-0.2m/s 12では32.7m/s以上になる。
波岨度
[編集]波の山と山の最高点間の水平距離を「波長」、波の山と谷の最高点と最低点の垂直距離を「波高」と呼んでいる。波の波高を波長で割った数値を「波岨度」(なみそど)と呼んで、波の斜面の急峻さを示す。
- 波岨度 = 波高 ÷ 波長
波岨度の理論上の最大値は7分の1程度とされるが、実際は10-15分の1程度が最大となる。
波周期
[編集]水上の一定箇所で1つの波が山から山まで通過する場合の時間が「波周期」であり、単位は秒で表される。
- 波長 = 1.56 × (波周期)2
- 波の移動速度(m/s) = 1.56 × 波周期
不規則波
[編集]嵐によって成長した海上の波は、波高も周期もバラバラで不規則な波によって構成されており「不規則波」と呼ばれている。 不規則波の大きさは高い順の上位3分の1の平均値で表され「有義波高」(Significant wave height)と呼ばれる。 不規則波の中で遭遇する可能性がある最も高い波は、有義波高の2倍であることが分かっている。
大きな波の成長
[編集]嵐の中では強く吹く風が原因で大きな波が生まれる。風速が速ければ大きな波が生じるが、風が吹く時間と距離も波の大きさに関係する。この風が吹いている時間を「吹送時間」、吹いている距離を「吹送距離」と呼んでいる。
波の大きさはSMB法(Sverdrup, Munk, Breschneider、スベルドラップ、ムンク、ブレットシュナイダーの3名によって開発された有義波高の計算手法)によって有義波高が求められる。
長時間、風が吹き続けばそれだけ波も成長するが、無限に大きくなる訳ではなくある程度の大きさで成長は頭打ちとなる。この成長しきった状態を波の「完全発達状態」と呼んでいる。
3つの抵抗成分
[編集]船舶の航行時には、造波抵抗、粘性圧力抵抗、粘性摩擦抵抗という3種類の抵抗成分が生じ、船の速力に応じて推進エネルギーは失われ速度は減殺される。
- 造波抵抗
- →詳細は「造波抵抗」を参照
- 水面に波を立てることで失われるエネルギーである。
- 造波抵抗はほぼ船の速度二乗に比例して増加するため、高速船の設計ではこの削減が特に考慮される要素となる。
- この波は「曳き波」として知られ、1990年代のヨーロッパでは初期の高速カーフェリーの登場時に港近くの砂浜で遊んでいた子供が引き波にさらわれる事故が起きたため、今では曳き波が周囲に与える影響も考慮する必要がある。
- 粘性圧力抵抗

粘性圧力抵抗。AとBでは同じ粘性圧力抵抗を受ける。 - 船体表面の水の流れが剥離して渦を作ると発生するために、船体が流線型であれば粘性圧力抵抗は極小化できる。

- 粘性摩擦抵抗
- 船体表面が水と接しながら移動する時に擦れることで失われるエネルギー。
- 単純に流れる水との接触面積の大きさと水流の速さに比例して粘性摩擦抵抗は表れる。
- 水もわずかながら粘性があり、船体表面に接触している水の層は船体に張り付くように振舞うが周囲の水は流れるために、速度に違いがある水の層が生まれる。この層は「境界層」と呼ばれ、境界層内で失われるエネルギーが粘性摩擦抵抗や単に摩擦抵抗と呼ばれる。
風の抵抗
[編集]推進エネルギーの損失を考える場合には、空気の密度は水の約800分の1であるため、水による損失のみが検討され、空気による抵抗成分は従来はあまり考慮されなかった。ただ横風による船体の動揺や横滑りが操船に無視できない影響を与えることが生じている。
接岸時と離岸時の危険性
[編集]純自動車専用船(Pure car carrier, PCC)のような上部構造物の巨大な船では船首部や船尾部を丸く作る事で風の抵抗を出来るだけ受けないようにする工夫も行なわれるようになった。
PCCに限らず、巨大コンテナ船や超大型フェリーも運搬対象がかさばる割に重量が軽い。このため、水面上の船体が水面下の船体に対して非常に大きい。これは空荷状態か満載状態によらない。いずれの場合も水に浮かぶサッカーボールのように風に簡単に流されてしまう。この現象は広い公海上ではそれほど問題とならないが、港での接岸と離岸時には危険を生む。実際に、これらの船が風に吹かれて流され、たびたび事故が発生している[7]。
抵抗の低減
[編集]船底
[編集]航海時に水流と接する船の底の表面の粗さは、直ちに摩擦係数の増大となって船足を下げ燃費の悪化を招くため、可能な限り平滑な状態を維持しなければならない。 船底には自己研磨性防汚ポリマー剤が塗装されており、これが水中へと徐々に溶け出すことでフジツボなどの海洋生物の付着を防止して平滑度を維持している。
バルバス・バウ
[編集]
近年21世紀初頭でのほとんど全ての大型で単胴の船舶の造船では、水中の船首部をバルバス・バウ(球状船首)とすることで造波抵抗を最小化する工夫を取り入れている。
バルバス・バウも設計時の喫水では最適の効果を発揮するが、空荷の時の貨物船やタンカーではバルバス・バウが水面上まで出てしまってかえって効率を悪くすることがある[8]。
バルバス・バウは水面下で船の前方に大きく突き出ているため、港に停泊中に小さなボートなどがこれらの船の前を横切ろうとする場合などに、誤って船底を擦ってしまう恐れがある。他船からバルバス・バウであることが判るように船首の両側面にバルバス・バウを備えているという印が描かれている。
シーマージン低減型船首
[編集]この節の加筆が望まれています。 |
斧の形をしたAx-Bow(アックスバウ、シップ・オブ・ザ・イヤー2001受賞)、鋭角な形をしたLEADGE-Bow(レッジバウ)[9]、Whale Back Bowは、船首端での水線面形状がシャープで、波から受ける抵抗が小さく、波浪中での船速低下が少ない。実海域でのシーマージンが小さい技術として、実用化されている[10]。
トリムタブとインターセプター
[編集]
モーターボート程の大きさの滑走船では、凪いだ水面を高速で航走すると船首が上がって船尾が下がる(船尾トリム)状態になってしまい滑走一歩手前でそれ以上加速できなくなることがある。船尾のトランサムの船底角に取り付けられた「トリムタブ」や「インターセプター」[11]と呼ばれる板を下方へ押し下げることで船尾に揚力を作り、過度な船尾トリム状態を解消して船底で発生していた抵抗を無くすことで滑走へと入ることが出来る。ただし、追求しすぎると速度低下をまねく。大型の高速船でもコンピュータ制御のトリムタブを持つ船がある。
係船装置
[編集]「係船装置」(Mooring arrangement)や係船のための設備には、ウィンドラス、ムアリング・ウインチ、キャプスタン、ビット、ムアリング・ホール、フェアリーダー、クリート等がある。
- ウィンドラス
- 「揚錨機」とも呼ばれる「ウィンドラス」(Windlass)は錨を降ろし・巻き上げる機械である。電気、油圧、蒸気で駆動される。揚錨機の「ホーサー・ドラム」または「ホーサー・リール」(Hawser reel)はロープをそのまま巻き取っておく部分。
- ムアリング・ウインチ
- 「ムアリング・ウインチ」(Mooring Winch)は甲板上にあり、主に係留策の巻き込みを行う装置。回転軸が水平になっている。ホーサーやワイヤーを巻き取っておくドラムが中央にあり両端に「ワーピング・エンド」(Warpping end)が付いていることが多い。ワーピング・エンドではロープは数回からめるだけで巻取らず、別に収納するために甲板から持ち去る。
- キャプスタン

キャプスタンとビット - 「キャプスタン」(Capstan)は甲板上のロープや鎖の巻き込み器の回転部分。回転軸が垂直になっている。ホーサー・ドラムと異なり、ロープは数回からめるだけで巻取らず、別に収納するために甲板から持ち去る。
- ビット
- 「ビット」(Bitt)は船の甲板上にあるロープを繋ぎ止めておくための円柱状の柱で、多くが2本1組で用いられる。小型船で使われる十字形をしたものは「クロス・ビット」と呼ばれる。
- ムアリング・ホール
- 「ムアリング・ホール」(Mooring Hole)または「チョック」は甲板の端でロープを通す円形の穴を持つ金具である。ロープが甲板の角に直接あたって擦り切れるのを防ぐと同時に、勝手に甲板上を動き回らないようにする。
- フェアリーダー
- 「フェアリーダー」(Fair Leader)はムアリング・ホールと同じ機能を持ち、下、または上下にローラーを備えて、ロープが動くのに合わせて回転し、擦り切れるのを防止する。ユニバーサル・フェアリーダーは上下左右の井桁状にローラーが付いている。ムアリング・ホールとほぼ同じであるが、穴ではなく上部が開いているので穴を通さずに上からロープをかけられる反面、なにかの弾みでロープが外れる恐れもある。
- クリート
- →詳細は「クリート」を参照
- 「クリート」はビットと同様に船の甲板上等にあるロープを繋ぎ止めておくための金属製の器具。クリートにロープを係止する場合は、「クリート結び」と呼ばれる結び方を用いることが多い。
- ボラード

岸壁のボラード(Bollard) - →詳細は「ボラード」を参照
- 「ボラード」(Bollard)や「係留ボラード」(Mooring Bollard)と呼ばれるものは、埠頭にある鋼鉄製の大きな突起物である。船の係留時に係留索(もあい綱、Mooring line、ホーサー(Hawser、直径40mm以上の係留索))の先の輪(ボラードアイ、Bollard Eye)を掛ける。簡単には外れないように上部が陸側に湾曲しているものが多い。木の「幹」を意味する「Bole」が語源である。ホーサーを使う場合には、ヒービング・ライン(Heaving Line) という細いロープを投げてから太いホーサーを手繰り寄せる。
- 日本ではJIS(日本工業規格)で誤って、海外でのBollardのことをビットと、Bittのことをボラードとしてしまったため、区別がつかなくなっている。


係船方法
[編集]操縦・操舵装置
[編集]- 操舵装置
- 船橋にあって、舵を動かす様に船尾に伝える装置を「操縦装置」または「操舵制御装置」といい、機械式、水圧式、電気式の3つの方式がある。
- 機械式では歯車やロッドによって伝えられるもので、小型船に多い方式である。
- 中大型の船でも、古い汽船では水圧式と電気式の両方式を備えていたが、その後、水圧式は廃止されて21世紀の現在は電気式を2系統備えている。
- 動力操舵装置
- 船長が60m以上の汽船は機械式の「動力操舵装置」(Steering Geer)を備えなければならないと定められている。
- 動力操舵装置には、蒸気圧式、電気式、電気油圧式の3つの方式があるが、大部分は電動モーターで油圧を作り、電気信号によって制御弁を操作して、ピストン/シリンダーによって舵を動かす電気油圧式によって操舵されている。
安全設備
[編集]航海灯
[編集]

白赤緑の3色の「航海灯」が夜間航海時の船舶の互いの視認に役立てられている。 これら3種類5個の航海灯の配置は万国共通で決められており、レーダーに頼らなくても、夜間に船体が見えなくても船の方向や大きさがほぼ判るようになっている。 後進した場合については法的に決められていないが、左右の赤と緑を逆にできるように左右とも赤緑両方が付いている場合と後部マストに左右逆に航海灯が付いている場合があり。後進している状態でも進路を誤認させないように工夫されていることが多い。
消火設備
[編集]「海上における人命安全会議」(SOLAS : Safety of lofe at sea)で1914年にSOLAS条約が13ヶ国で調印され海運の国際秩序と海上における人命及び財産の安全確保のために「IMCO」(政府間海事協議機関)が1958年に発足した。これらの機関によってその後、さまざまな案設備に関する決まりが定められた。
船舶では防熱上や構造上の境界によって40mを越えない仕切られた区域に区分されている。特に居住部分は他の部分から隔離されている。船内は可燃性材料の使用を控え、火災探知、警報、消火、脱出の各装置が備えられている。持ち運べる消火器も多数が用意されている。
消火設備は、消火専用のポンプの他に、普段はバラスト・ポンプ、雑用水ポンプ、衛生ポンプとして使用しているものを火災発生時に消火用に使用することが認められている。多くのポンプが機関室にあるため、機関室からの火災の場合を考えて機関室外の独立して働くポンプも備えられていて、通常は船尾舵機室にある。船内のどこから出火しても2条以上の放水が可能なように消火水配管と消火栓、消火ホースが配置されている。消火ホースは船長30mに付き主と予備の合わせて2組を備え、最低5組が用意される。
固定式の消火装置として、ガスによるもの、発泡水によるもの、霧状放水によるもの、スプリンクラーによるものがある。これらが火災探知機とともに、特性・効果を考慮して配置されている。 タンカーにはイナート・ガス発生装置が備わり、油槽からの火災を未然に防いでいる。
火災探知機は光の遮断を探知するものや、空気中のイオンを探知するもの、空気の膨張を探知するものなどがある。
救命胴衣
[編集]およそ船舶と名の付くものすべてに、乗船する乗員乗客の総数以上分の「救命胴衣」(ライフジャケット)の搭載が義務付けられている。 固体式(浮力材:発泡スチロール)、気体封入式(浮力:常圧のガス)、膨張式(使用時にボンベからのガスで膨張する)、固体膨張ハイブリッド式、等の救命胴衣がある。
救命浮輪(きゅうめいうきわ、Life Buoy)も露天デッキの各所に備えられている。
救命ボート
[編集]ある程度の距離を航海する船舶は、船体が沈没や火災などの危険な状態から乗員乗客が安全に避難できるよう、必要なだけの「救命ボート」の搭載が義務付けられている。外洋客船では国際規則によって、片舷の救命ボートだけでも乗員乗客の避難に必要なだけの数を備えるように決められている。
救命ボートにはボート型の他にプラスチック・カプセルに収められた膨張式の「救命いかだ」(Life raft)もある。救命いかだのカプセルはたとえ沈没する船に放置されたままでも4m以上の水深水圧が加われば自動的に離れて水中から浮かび上がり展張するようになっている。
救命ボート内には1人当り3リッター分の飲料水をはじめ、食料や発煙信号器、懐中電灯などいくつかの救命用備品が備えられている。
大型のクルーズ船では100人程度が乗船できるテンダーボートと兼用の小型船を搭載していることが多く、大型船が接近できない場所を観光する際にも使用される。
-
 手漕ぎ式の救命ボート
手漕ぎ式の救命ボート -
 救命いかだと船から伸びた脱出シュート
救命いかだと船から伸びた脱出シュート -
 円形の救命いかだ
円形の救命いかだ -
 カプセルに収められた膨張式の救命いかだ
カプセルに収められた膨張式の救命いかだ -
 船室を備えた救命ボート
船室を備えた救命ボート -







GMDSS
[編集]GMDSS(Global Maritime Distress and Safety System)は海上安全の為の包括的な遭難通信システムの全体構想の名称であり、1999年2月から完全実施が開始された。実際に船に搭載されるのは次に示す E-PIRB、DSC通信装置、インマルサット通信装置、SART という個別の通信装置である[7]
E-PIRB
[編集]大型船の露天デッキに備わっている「E-PIRB」(Emergency Position Indicate Radio Beacon、イーパブ)は沈没する船に放置されたままでも4m以上の水深水圧が加われば自動的に離れて浮かび上がり、船名や位置情報を含む救難信号を発信するようになっている。
1999年2月1日からは「SOS」で有名だった海上緊急通信としてのモールス信号は公式には廃止され、電子装置が発するデジタル信号を基本とするGMDSSに置き換わっている。E-PIRBもGMDSSを使用している。
DSC通信装置
[編集]DSC(デジタル選択呼出:Digital selective calling)通信装置は無線機に付加して特定の無線局との通信チャンネルを自動的に設定する機能である。ボタン一つで遭難信号を送信する機能も備える。
インマルサット通信装置
[編集]インマルサット(INMARSAT)通信装置は海上交通や航空・陸上の交通の安全のための緊急通信用インマルサット静止衛星を使って遭難信号を含む重要な通信を送受信する通信装置である。静止衛星であるためアンテナさえ安定できれば常に緊急通信によって音声を含む送受信が行なえるため、モールス符号による緊急通信の制約を過去のものにした。
- インマルサットEGC放送
- インマルサット静止衛星から海上安全情報を文字放送している。大型船舶では自動受信した放送をプリントアウトする[7]。
SART
[編集]SART(Search and rescue radar transponder)は沈没などの事故時において、捜索航空機のレーダー電波に対して自動的に遭難信号を応答発信する装置であり、沈没前に海上に浮かべておけば救難捜索活動の短縮化に役立つ[7]。
国際VHF
[編集]国際VHF(marine VHF band)は入出港時や遭難時などに使用される。総トン数が100トン以上の日本船舶には、DSC付き国際VHFの設置が義務付けられており、その他の日本船舶の設置は任意である。これらを使うには総合無線通信士、海上無線通信士またはレーダー級以外の海上特殊無線技士の資格が必要である。ただし、第三級海上特殊無線技士は5Wをこえるもの及びDSCは操作できない。(無線従事者参照)
総務省は、2008年のイージス艦衝突事故を契機に、国際VHFを船舶共通通信システムと位置づけ[12]、設置義務の無い100トン未満の船舶に対し普及促進するため2009年10月に省令・告示を改正[13]した。
アンカー
[編集]
アンカー(錨)は比較的浅い沿岸海域などで停泊する場合に、海底に投錨することで船体の移動を抑制する機能を果たす。
特に台風などで強風や波浪の高まりが予想される場合には、大型船は港内での高潮によって岸壁に乗り上げたり係留索の断裂等による事故を避ける為、港から開けた沿岸海域に事前移動後、投錨して危険を避ける事が普通である。
21世紀はじめの近年では、使用しないときには余分な重量となるアンカーは軽量ものを1つだけ搭載する船もあり、いざとなればエンジンをかけて風に対抗することでアンカーの軽量化分を十分補えるとしている。
運動
[編集]船舶の運動は地上での自動車での走行とは異なり、いくつか特異な挙動を示す。以下に単胴船での特異な運動例を示す。
旋回
[編集]

船舶では右旋回を面舵(おもかじ)と呼び、左旋回を取舵(とりかじ)と呼ぶ。例えば、面舵(右旋回)の開始直後の短時間だけいちど船は反対方向の左へ向かう。これは「キック」と呼ばれ、舵によって操向される船独特の挙動である。以下の説明では右旋回での例を示すが、左旋回でも左右が逆になるだけで同じである。
標準的な船舶の舵は、スクリュー直後の位置に取り付けられていて、面舵(右旋回)の時は舵面は右側に突き出される。スクリューによって生み出された水流が舵面の揚力によって右に偏向されるため、船体後部は左方向へ押される。船体後部の左方向への力は船の向きを右へと回転させるように働くが、回転する効果が現れる前に船体後部で生じた左方向への押す力が先に船体を左へと押し流す。これがキックである。キックは喫水の浅い船で強く現れる。
船舶が旋回する時に、舵によって生み出される回転力は実は実際の旋回に発揮される力の一部でしかなく、船体が旋回を始めて船に対する水流方向が斜めになるために生じる船体を押す力も回転力として効果を発揮している。
また旋回時にはまずキックが起きるのと同じ理由で、水面下で舵が左方向へ船体を押すために船は短時間だけ右側へ、つまり回転内向きに傾き(内方傾斜、ないほうけいしゃ)、少し遅れて船が右方向へと曲がりだすと遠心力で船体が左に、つまり回転外向きに傾く(外方傾斜、がいほうけいしゃ)。特に外方傾斜は大きく傾くため、強い旋回を行なえば、客船では快適性が損なわれ貨物船では荷崩れのリスクが高まる[11]。
このように、舵によって船体が左右に傾くことを利用して、船の揺れを抑える減揺装置に利用しようという研究が進められている。
停止
[編集]通常の船舶ではブレーキは存在しないため、航走状態から停止するにはエンジンを逆回転するなり、ギヤを逆回転位置にするなり、可変ピッチプロペラ・スクリューを逆ピッチにするなりしてスクリューが生み出す水流を後進方向に変えることでブレーキの働きを行なわせている。
危険回避などでこのような全速後進を行うことを「クラッシュ・アスターン」と呼ぶ。大きな船ではクラッシュ・アスターンでも船の長さの十数倍の距離を進んでしまう。
スクリューが通常とは逆方向の水流を作る時には、舵はほとんど役目を果たさなくなる。
停止のための逆進を行なわずにいれば、大型船ではエンジンを切っても3km程は惰性で進む。
保針性能
[編集]船では旋回性能だけでなく直進する性能も重要である。まっすぐ進む性能を「針路安定性能」や「保針性能」と呼ぶ。船は常に波にさらされながら航海する場合がほとんどであり、波は船の針路を少しずつ曲げてゆく。
保針性能が低いと波の影響によって常に針路を修正しなければ正しい航路を維持できず、常に舵によって修正を続けることは操舵装置への負担と共に、抵抗も増えて燃費が悪くなる。
保針性能を測るには船をジグザグに走らせるジグザグ試験(Z試験)によってその反応から判定する。
特異な運動特性
[編集]
- バウダイビング(Bow diving)

バウダイビング - バウダイビングに似た現象に、青波(あおなみ、Green water)がある。青波は波そのものが大きく、船首に波がそのまま乗ってくる状態である。青波も大きなエネルギーを持っており、FRP製のコンバーチブルタイプのプレジャーボートでは、フライブリッジごと引き剥がされる場合がある。

- ポーポイジング(Porpoising)

ポーポイジング - ポーポイジングという名前はネズミイルカの英語名「Porpoise」から来ており、ここであげたモーターボートの例以外にも、飛行機や飛行艇、水上機、潜水艦などの同様の運動に対して使われる。

- ブローチング(Broaching)

ブローチング - 船が後方から強い波を受けて波の斜面を下る形の波乗り状態になり、船の速度と波の速度が同じになると舵が効かなくなる。そのまま波の谷底付近で船の方向が急旋回してしまい、90度横向きになると同時に遠心力で船体が横向きの力を受ける現象を「ブローチング」と呼ぶ。時には船体が横倒しになる事がある。
- ブローチングを避けるため、後方から波を受ける時は速度を落とす必要がある。
- また、帆船では、風による推進力が舵の制御能力を超えた場合、ブローチングに至る場合がある。

- パラメトリック横揺れ

パラメトリック横揺れ
1.水線面積減少 2.水線面積増大 3.静水時水線 4.波浪による水線。波浪によって1.と2.の状態を繰り返す。- 水線面の面積は復原力にとって重要な要素であり、水線面面積の増減によって復原力係数が変化する。波浪によって水面が上下することでこの水線面の面積が減少・増大を繰り返し、波による水線面面積の周期的な変化は同時に復原力係数の周期的な変化をもたらす。
- 復原力係数の変動が船体固有の横揺れ周期の半分になった時、船体の横揺れが増幅されて「パラメトリック横揺れ」と呼ばれる強い横揺れが発生することがある。パラメトリック横揺れでは横揺れの周期1に対して縦揺れの周期は半分で同調するため、2回の縦揺れの間に1回の横揺れを起こすことになる。
- 追波を受ける状態ではパラメトリック横揺れの発生リスクが高くなるが、向波の中でも発生することがある。高速船のような水線面積の変化が大きな船型の船では発生しやすく、21世紀初頭の最近登場したバトックフロー船型の船では横波でも発生することが確認されている。

- 制限水路影響
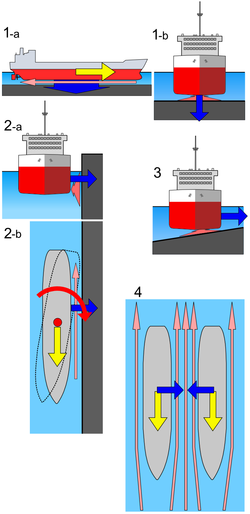
制限水路影響
1-a,1-b:浅水影響 2-a,2-b:側壁影響 3.傾斜海底影響 4.船接近影響- 浅水影響
- 「浅水影響」は船底が水底に近いために、船底部周囲の水の流速が早くなり船体が下方へと引かれ喫水が大きくなることである。
- 側壁影響
- 「側壁影響」は運河などの通航時に船体が側壁に近い場所を航行すると船体と側壁との間の水が早く流れる場合に側壁に吸い付けられるように引かれることである。また、多くの船体は船首は船尾に比べて細身であるため、側壁に引かれる力の中心は船の重心より少し後方側になり、船尾側がより強く引かれることになるため船体が回頭する。このため、当て舵をとるなど正しい操船には高度な技術が求められる。
- 傾斜海底影響
- 「傾斜海底影響」は浅水影響の特殊例であり、水底が水平ではなく傾いているとき、下方へと引かれる場所に左右での違いが生じて船体が浅い方へよっていくことである。浅水影響と同じく船尾側がより強く引かれるために船体が回頭する。水底の細かな水深の違いは船上からは判らないために、正しい当て舵量を予測するのはかなり困難となる。
- 2船接近影響
- 「2船接近影響」は側壁や水底ではなく、他の船との相互の干渉によって側壁影響とほぼ同じ現象がより強く起こることである。
- 長年の経験を積んだ大型船の船長でも離岸時に制限水路影響を考慮せずに岸壁から十分に離れないまま全速前進をかけてしまうことがある。この結果、「側壁影響」によって船体は岸壁に寄り、岸壁にこすり付けて船に穴を開け、ビットを壊してしまう事故が起こる[7]。
_NT.PNG)
脚注
[編集]- ^ “What is Seamanship”. American Sailing Association. 19 April 2021閲覧。
- ^ Chapman Piloting & Seamanship, 64th edition page 48.
- ^ Duttons Navigation and Piloting, U.S. Naval Institute
- ^ The Ice Navigation Manual (1st ed.). Witherby Publishing Group. (2010) July 26, 2017閲覧。
- ^ “船乗りの仕事 一覧:船乗りになる”. 【海の仕事.com】. 2021年6月22日閲覧。
- ^ 渡辺逸郎著 「コンテナ船の話」 成山堂書店 18年12月18日初版発行 ISBN 4425713710
- ^ a b c d e 仲之薗郁夫著 「海のパイロット物語」 成山堂書店 2002年1月28日初版発行 ISBN 4-425-94651-0
- ^ 小野寺幸一著 「地球90周の航跡」 東京経済 1995年4月20日第一刷発行 ISBN 4-8064-0419-5
- ^ 日本海事センター 編「船の省エネ技術開発」『海の環境革命~海事社会と地球温暖化問題~』(PDF)2010年3月、17頁。
- ^ ジャパン マリンユナイテッドホームページ TOP > 技術・研究開発 > 技術開発 > 流力技術 > 実海域性能
- ^ a b 池田良穂著 「図解雑学 船のしくみ」 ナツメ社 2006年5月10日初版発行 ISBN 4-8163-4090-4
- ^ 海上における船舶のための共通通信システムの在り方及び普及促進に関する検討会報告書p.14 (PDF) 「海上における船舶のための共通通信システムの在り方及び普及促進に関する検討会」報告書(案)に対する意見募集の結果及び最終報告書の公表 総務省報道資料別紙3 平成21年1月27日 (国立国会図書館のアーカイブ:2009年7月22日収集)
- ^ 船舶が任意に設置する安価な国際VHF機器の導入に伴う関係規定の整備 総務省報道資料 平成21年10月1日 (国立国会図書館のアーカイブ:2009年10月21日収集)
参考文献
[編集]- Admiralty Manual of Seamanship, ISBN 0-11-772696-6.
- Seamanship: A Guide for Divers / Kris Pedder, BSAC, ISBN 0-9538919-7-6.
- Naval Shiphandler's Guide / James Alden Barber — Naval Institute Press, 2005 — ISBN 1-55750-435-0.
- Royal Navy (Book of Reference) BR67.
- 21st Century Seamanship, Witherby Publishing Group, 2015, ISBN 1-85609632-7.
関連項目
[編集]外部リンク
[編集]- Chisholm, Hugh, ed. (1911). . Encyclopædia Britannica (英語) (11th ed.). Cambridge University Press.
- "The Benefits from Knowing the Basics and Rules of Seafaring" is a collection of eight documents about seafaring by Ibn Mājid al-Julfārī al-Sa‘dī, in the 15th century.